|
|
HŘÍŠNÍCI NOVÝ UŽIVATEL nepřihlášený uživatel Právě si tyto stránky čte 1 člověk. |
|
Poslední změna:
29.09.2007 |
|
Návštěvník číslo: 26523 |
| ICQ:61783389 |
|
Copyright © 2003 Hell |
Elektrické měřeníElaborátyMěření na 3-fázovém asynchronním motoruZadání Na 3-fázovém asynchronním motoru proveďte tato měření : a) Měření odporů vinutí za studena ohmovou metodou. b) Měření izolačních odporů jednotlivých fází statoru a rotoru proti kostře a proti sobě. c) Zkouška naprázdno pro napětí od 30 do 110% U". d) Zkouška nakrátko pro 5 až 30% U". (Lze měřit hodnoty jmenovitého proudu statoru) . e) Zatěžovací zkoušku asynchronního motoru na dynamometru f) Simulaci zatěžování téhož asynchronního motoru na PC. Ze všech měření vyneste
příslušné grafy a jmenovitě proveďte porovnání chování skutečného motoru při
zátěži a simulovaného. Indukční stroj je nejpoužívanější a nejrozšířenější elektrický stroj. Většinu strojů tvoří indikční motory, protože se kladou nízké nároky na údržbu a mají nízkou pořizovací cenu. Indukční stroj je točivý elektrický stroj, který má magnetický obvod rozdělen malou vzduchovou mezerou na statoru a rotoru. Indukční motor pracuje na principu elektromagnetické indukce. Na statoru je umístěno trojfázové vinutí, které se připojuje ke zdroji střídavého napětí. Trojfázový proud vytváří statorové točivé magnetické pole, které časovou změnou indukuje ve vinutí motoru napětí, které protlačí vinutím motoru proud, neboť rotorové vinutí je spojeno na krátko. Toto vytvoří magnetické pole, které působí na magnetické pole statoru a začne se otáčet. Otáčky motoru jsou vždy menší než synchronní otáčky točivého magnetického pole statoru. Proto se v praxi nazývá tento motor asynchronním motorem. Indukční motory dělíme na : kroužkové a nakrátko a dále na trojfázové a jednofázové. Základní úlohou trojfázového statorového vinutí indukčního motoru je vybudit točivé magnetické pole s požadovaným počtem pólů, které se otáčí synchronními otáčkami. Póly potom určují i otáčky motoru. Kromě této základní úlohy vinutí je nutné přihlížet i k dalším kvalitativním činitelům, které ovlivňují kvalitu točivého magnetického pole a také vlastnosti indukčního motoru v provozu. Jedním z těchto činitelů, podle něhož posuzujeme vlastnosti určitého pro indukční motory, je tvar magnetického pole, které je buzeno daným vinutím. Žádáme sinusový průběh magnetické indukce točivého magnetického pole ve vzduchové mezeře. Nesinusový průběh magnetické indukce točivého magnetického pole zhoršuje provozní vlastnosti motoru. Vinutí je proto důležitou částí, kterou lze ovlivnit jeho vlastnosti v provozu. Základním prvkem vinutí je cívka, která může mít různý tvar a různým počet závitů.Ty části cívky, které jsou v drážkách , se nazývají cívkovými stranami. Cívkové strany jsou spojeny čely. Čela cívek se formují tak, aby sledovala obvod stroje a nepřekážela rotoru v otáčení. Tvar a uspořádání čel závisí na druhu vinutí. Chod naprázdno Jestliže připojíme indukční motor k trojfázové síti a na hřídeli ho nezatížíme, říkáme, že je v chodu naprázdno. U ideálního motoru se při chodu naprázdno rotor otáčí synchronními otáčkami, neboť se zde zanedbávají ztráty mechanické a v železe. Rotor vzhledem k točivému magnetickému poli stojí a v jeho vinutí se neindukuje napětí. Vodiči rotoru neprochází proud a motor nevytváří točivý moment. Skutečný chod naprázdno je však v podstatě chod s malým zatížením, neboť motor dodává určitý výkon na krytí mechanických ztrát DPm ( tření v ložiskách a tření rotoru a vzduchu) a ztráty ve vinutí statoru a ztráty v železe se kryjí přímo ze sítě. Kromě toho odebírá motor ze sítě magnetizační prou Im pro vybuzení točivého magnetického pole s tokem, nímž je ve fázi. Otáčky motoru se blíží synchronním otáčkám točivého magnetického pole us, tzn. že skluz je velmi malý a rotorový proud je zanedbatelně malý. Chod nakrátko Indukční motor je v chodu
nakrátko tehdy, jestliže jeho rotor stojí, tzn. na začátku každého rozběhu a
při zastavení vlivem přetížení. Stojí-li rotor, otáčí se magnetické pole vzhledem
ke statoru a rotoru stejně rychle. Přitom se ve vinutí rotoru indukuje napětí,
které protlačuje při nulovém zatěžovacím odporu proud jen nepatrným odporem
rotorového vinutí. Tento zkratový proud je velký a závisí na frekvenci sítě.
Při otáčkám rotoru n = 0 je skluz s = 1. Vodivost cesty u hlavního
magnetického toku vzhledem k vodivosti cesty rozptylového magnetického
toku je menší než u transformátoru, neboť transformátor nemá v hlavním
magnetickém obvodu vzduchové mezery. Magnetický tok se téměř rovná součtu rozptylových
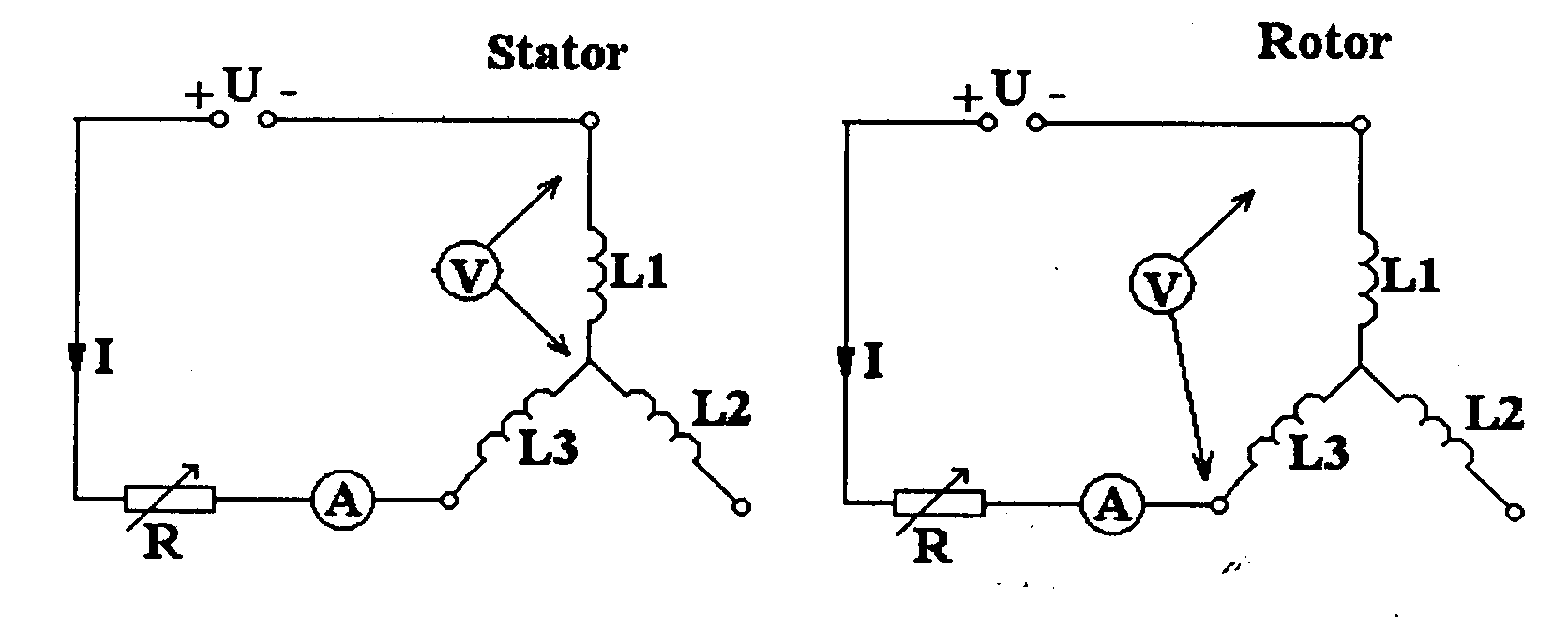
magnetických toků. Účinnost motoru je obecně poměrem Naměřené hodnoty, schéma zapojení, …a) Měření odporů vinutí za studena ohmovou metodou. Celkový odpor :
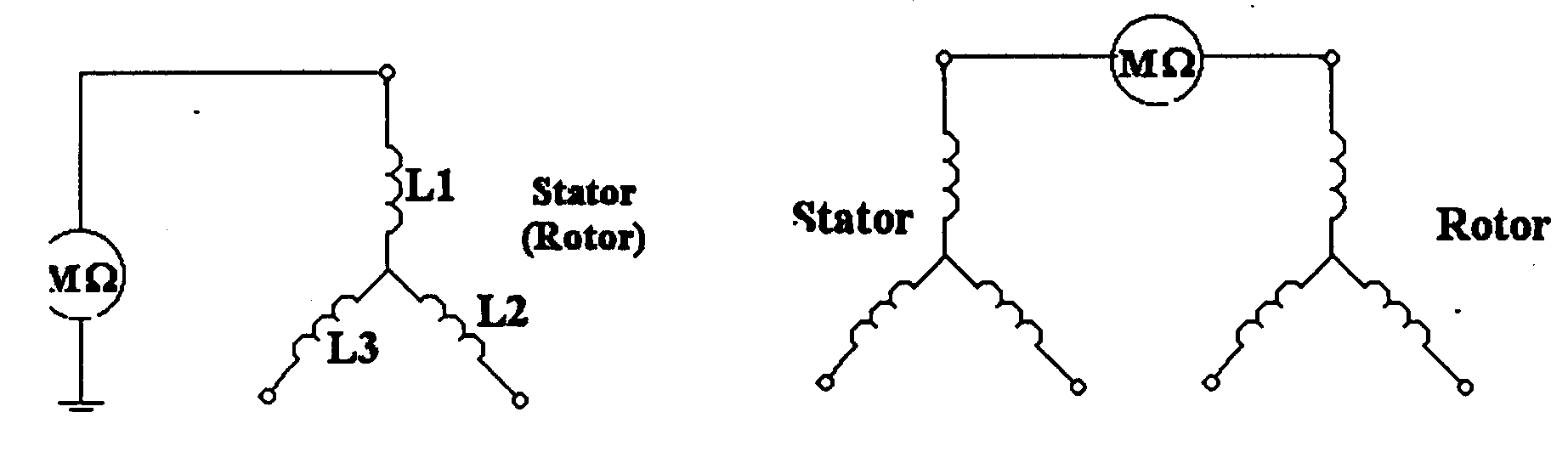
b) Měření izolačních odporů jednotlivých fází statoru a rotoru proti kostře a proti sobě
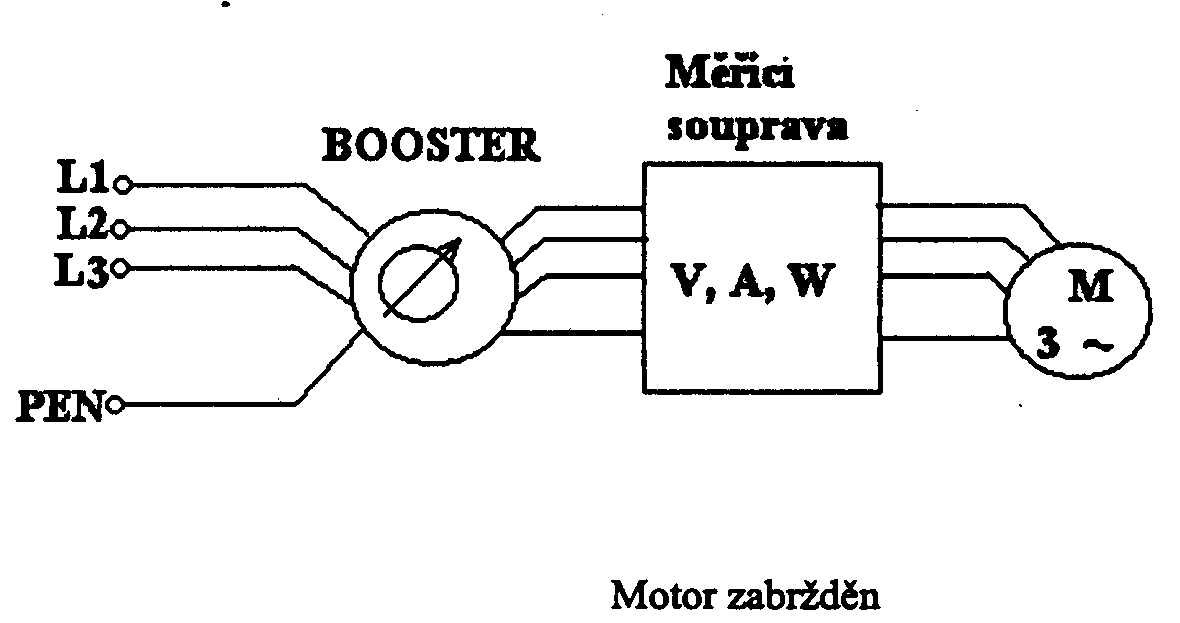
c) Zkouška naprázdno pro napětí od 30 do 110% Un
Použité vzorce : opor statoru ze zkoušky a) d) Zkouška nakrátko pro 5 až 30% U". (Lze měřit hodnoty jmenovitého proudu statoru)
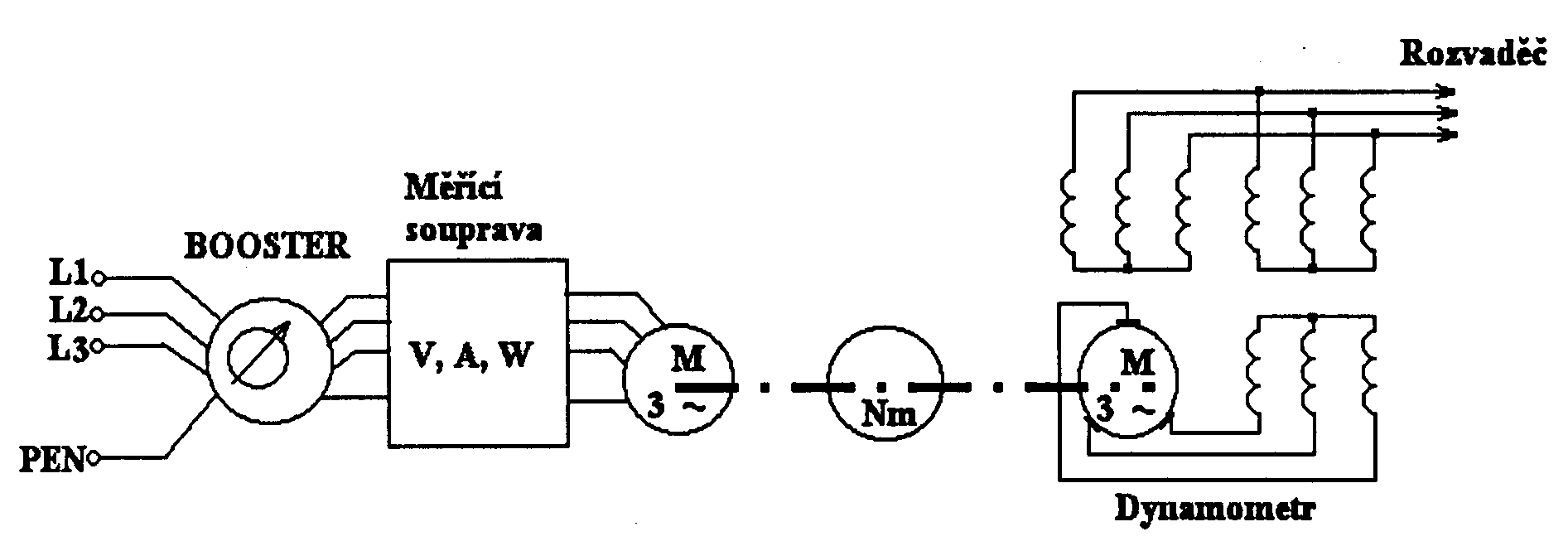
e) Zatěžovací zkoušku asynchronního motoru na dynamometru
Použité vzorce : f) Simulaci zatěžování téhož asynchronního motoru na PC
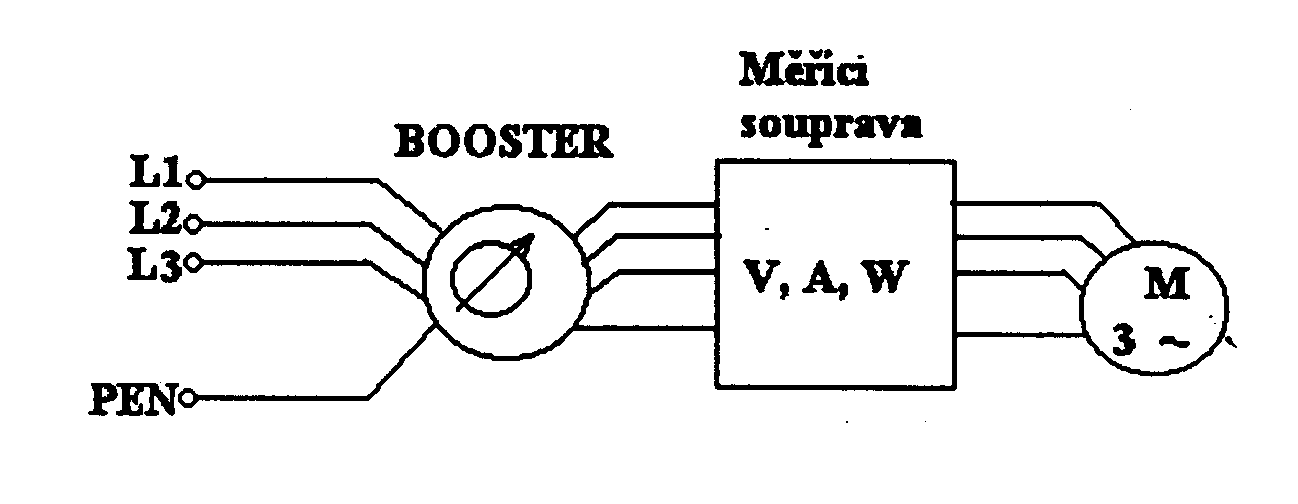
Postup měření Měření probíhalo následovně: Podle zadání jsme postupovali po jednotlivých bodech a postupně ve skupinách jsme to odměřili. Schéma zapojení k jednotlivým bodům je u každého bodu uvedeno, následně je tam i tabulka s hodnotami. Při měření jsme všichni spolupracovali a každý si odměřil svojí část. Následně jsme dali hlavy dohromady a vše si navzájem půjčili. Nejdříve jsme změřili ohmovou metodou odpory na vedení za studena, čili pomocí baterie, voltmetru a ampérmetru. Dále jsme změřili izolační odpory jednotlivých fází statoru a rotoru proti kostře a proti sobě pomocí megaohmetru . Dále proběhla zkouška naprázdno pro napětí od 30 do 110% U, pak d) Zkouška nakrátko pro 5 až 30% U". (Lze měřit hodnoty jmenovitého proudu statoru), pak jsme provedli zatěžovací zkoušku asynchronního motoru na dynamometru a nakonec další hodinu jsme provedli simulaci zatěžování téhož asynchronního motoru na PC. Závěr Měření odporů bylo bez problémů. Při porovnání zatěžovací zkoušky asynchronního motoru na dynamometru a téhož provedeného jako simulaci zatěžování téhož asynchronního motoru na PC je zřejmé, že při měření účinnosti jsme se pravděpodobně dopustili nepřesnosti na začátku charakteristiky, ostatní grafy vyšli dobře. Je jasné, že při simulaci můžeme jít mnohem výš s proudovou zátěží, než si můžeme dovolit při reálném provozu. Motor by nám shořel. Použité přístroje Motor:
Spousta drátů různobarevných (růžoví, modroučký apod.) IBM Compatible PC Měřicí souprava (napětí, výkonu, proud na jednotlivých fázích) Ampérmetr Ovládací pult motoru ala STAR TREK Obrovskej ciferník s malou ručičkou (měří moment síly) Megaohmmetr digitání Megaohmmetr analogový – ukázka straších let, na kličku a dáva 1000V čísla přístrojů jsou utajena US army (TOP SECRET)
|
|
zpět na předchozí stránku
Copyright © 2003 Hell
doporučené rozlišení 1024x768